
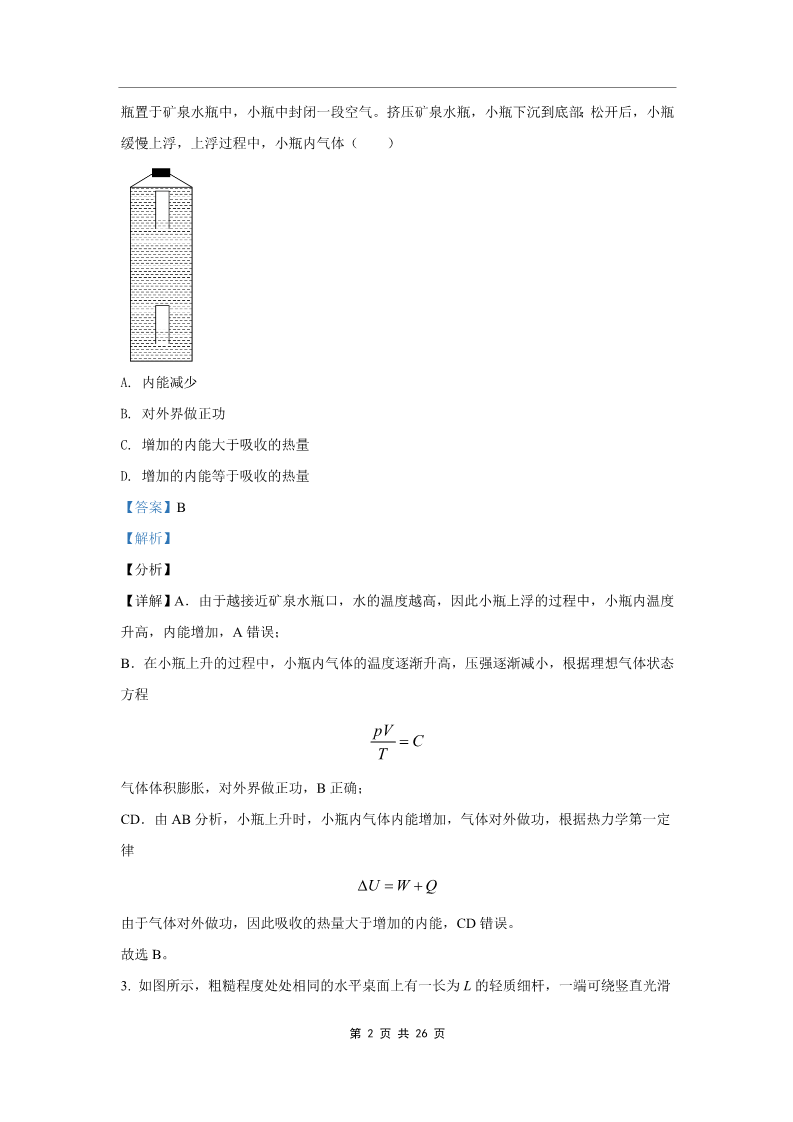
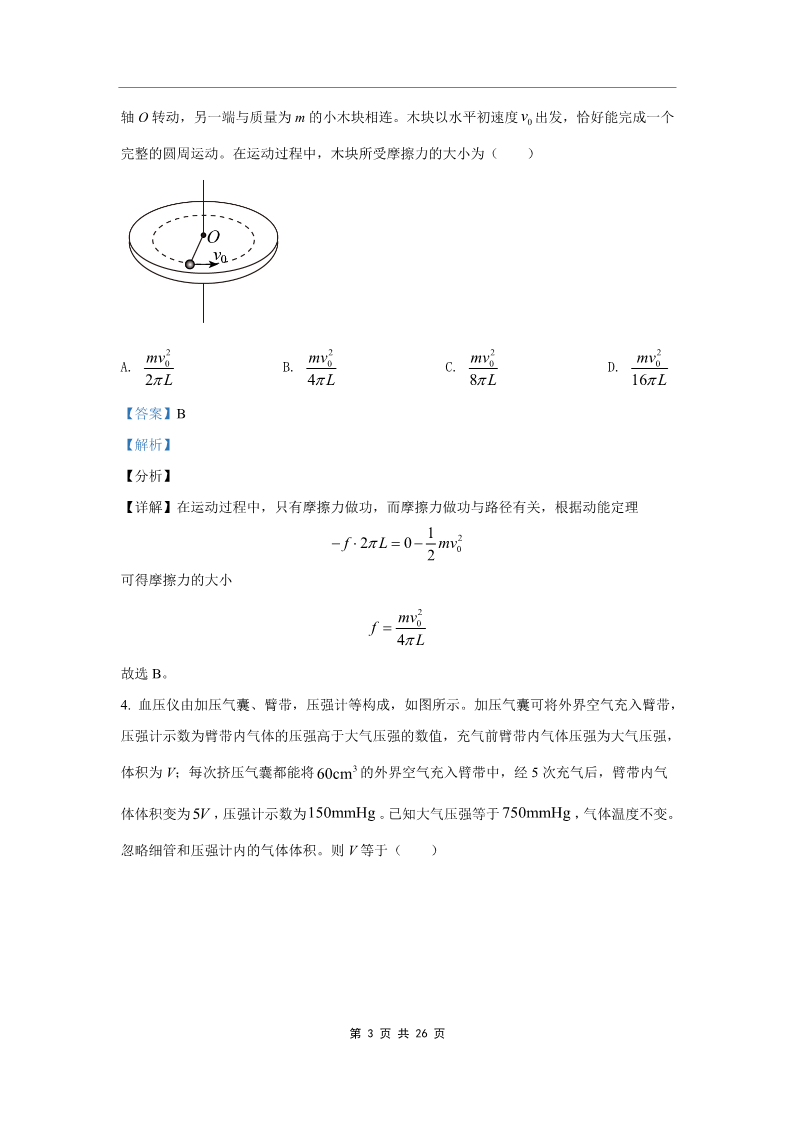
 绝密★启用前 2021 年普通高等学校招生全国统一考试(山东卷) 物 理 注意事项: 1.答卷前,考生务必将自己的姓名、考生号等填写在答题卡和试卷指定位置。 2.回答选择题时,选出每小题答案后,用铅笔把答题卡上对应题目的答案标号涂 黑。如需改动,用橡皮擦干净后,再选涂其他答案标号。回答非选择题时,将 答案写在答题卡上,写在本试卷上无效。 3.考试结束后,将本试卷和答题卡一并交回。 一、单项选择题:本题共 8 小题,每小题 3 分,共 24 分。每小题只有一个选项 符合题目要求。 210 Pb 1. 在测定年代较近的湖泊沉积物形成年份时,常利用沉积物中半衰期较短的 82 ,其衰变 210 Pb 210 Bi X 方程为 82 。以下说法正确的是( ) 83 A. 衰变方程中的 X 是电子 210 Pb B. 升高温度可以加快 82 的衰变 210 Pb 210 Bi 的质量差等于衰变的质量亏损 C. 与 83 82 210 Pb D. 方程中的 X 来自于 82 内质子向中子的转化 【答案】A 【解析】 【分析】 【详解】A.根据质量数守恒和电荷数守恒可知,X 是电子,A 正确; B.半衰期非常稳定,不受温度,压强,以及该物质是单质还是化合物的影响,B 错误; 210 Pb 210 Bi C. 与和电子 X 的质量差等于衰变的质量亏损,C 错误; 82 83 210 Pb D.方程中的 X 来自于 故选 A。 内中子向质子的转化,D 错误。 82 2. 如图所示,密封的矿泉水瓶中,距瓶口越近水的温度越高。一开口向下、导热良好的小 第 1 页 共 26 页 瓶置于矿泉水瓶中,小瓶中封闭一段空气。挤压矿泉水瓶,小瓶下沉到底部;松开后,小瓶 缓慢上浮,上浮过程中,小瓶内气体( ) A. 内能减少 B. 对外界做正功 C. 增加的内能大于吸收的热量 D. 增加的内能等于吸收的热量 【答案】B 【解析】 【分析】 【详解】A.由于越接近矿泉水瓶口,水的温度越高,因此小瓶上浮的过程中,小瓶内温度 升高,内能增加,A 错误; B.在小瓶上升的过程中,小瓶内气体的温度逐渐升高,压强逐渐减小,根据理想气体状态 方程 pV C T气体体积膨胀,对外界做正功,B 正确; CD.由 AB 分析,小瓶上升时,小瓶内气体内能增加,气体对外做功,根据热力学第一定 律U W Q 由于气体对外做功,因此吸收的热量大于增加的内能,CD 错误。 故选 B。 3. 如图所示,粗糙程度处处相同的水平桌面上有一长为 L 的轻质细杆,一端可绕竖直光滑 第 2 页 共 26 页 v轴 O 转动,另一端与质量为 m 的小木块相连。木块以水平初速度 0 出发,恰好能完成一个 完整的圆周运动。在运动过程中,木块所受摩擦力的大小为( ) mv02 mv02 mv02 mv02 A. B. C. D. 2 L 4 L 8 L 16 L 【答案】B 【解析】 【分析】 【详解】在运动过程中,只有摩擦力做功,而摩擦力做功与路径有关,根据动能定理 1 f 2 L 0 mv02 2可得摩擦力的大小 mv02 f 4 L 故选 B。 4. 血压仪由加压气囊、臂带,压强计等构成,如图所示。加压气囊可将外界空气充入臂带, 压强计示数为臂带内气体的压强高于大气压强的数值,充气前臂带内气体压强为大气压强, 体积为 V;每次挤压气囊都能将 3 的外界空气充入臂带中,经 5 次充气后,臂带内气 60cm 150mmHg 750mmHg ,气体温度不变。 体体积变为5V ,压强计示数为 。已知大气压强等于 忽略细管和压强计内的气体体积。则 V 等于( ) 第 3 页 共 26 页 30cm3 40cm3 50cm3 60cm3 A. B. C. D. 【答案】D 【解析】 【分析】 【详解】根据玻意耳定律可知 p0V 5p0V0 p1 5V 已知 V 60cm3 p 750mmHg p 750mmHg+150mmHg 900mmHg ,,010代入数据整理得 V 60cm3 故选 D。 5. 从“玉兔”登月到“祝融”探火,我国星际探测事业实现了由地月系到行星际的跨越。 已知火星质量约为月球的 9 倍,半径约为月球的 2 倍,“祝融”火星车的质量约为“玉兔” 月球车的 2 倍。在着陆前,“祝融”和“玉兔”都会经历一个由着陆平台支撑的悬停过程。 悬停时,“祝融”与“玉兔”所受陆平台的作用力大小之比为( ) A. 9∶1 B. 9∶2 C. 36∶1 D. 72∶1 【答案】B 第 4 页 共 26 页 【解析】 【分析】 【详解】悬停时所受平台的作用力等于万有引力,根据 mM R2 F G 可得 F祝融 F玉兔 M火m祝融 M月m玉兔 922 92=G :G =2= 22R火 R月 故选 B。 q 6. 如图甲所示,边长为 a 的正方形,四个顶点上分别固定一个电荷量为 的点电荷;在 2Q 区间,x 轴上电势 的变化曲线如图乙所示。现将一电荷量为 的点电荷 P 0 x a2置于正方形的中心 O 点,此时每个点电荷所受库仑力的合力均为零。若将 P 沿 x 轴向右略 微移动后,由静止释放,以下判断正确的是( ) 2 1 2A. B. C. D. ,释放后 P 将向右运动 ,释放后 P 将向左运动 ,释放后 P 将向右运动 Q Q Q Q qq2 1 22 21 q42 21 ,释放后 P 将向左运动 q4【答案】C 【解析】 【分析】 第 5 页 共 26 页 【详解】对 y 轴正向的点电荷,由平衡知识可得 q2 q2 ( 2a)2 Qq 2k k k a2 2(a)2 22 21 解得 因在 Q q42区间内沿 x 轴正向电势升高,则场强方向沿 x 轴负向,则将 P 沿 x 轴正 a0 x 2向向右略微移动后释放,P 受到向右的电场力而向右运动。 故选 C。 7. 用平行单色光垂直照射一层透明薄膜,观察到如图所示明暗相间的干涉条纹。下列关于 该区域薄膜厚度 d 随坐标 x 的变化图像,可能正确的是( ) A. C. B. D. 【答案】D 【解析】 【分析】 【详解】从薄膜的上下表面分别反射的两列光是相干光,其光程差为△x=2d,即光程差为薄 膜厚度的 2 倍,当光程差△x=nλ 时此处表现为亮条纹,故相邻亮条纹之间的薄膜的厚度差为 1λ,在图中相邻亮条纹(或暗条纹)之间的距离变大,则薄膜层的厚度之间变小,因条纹 2宽度逐渐变宽,则厚度不是均匀变小。 第 6 页 共 26 页 故选 D。 8. 迷你系绳卫星在地球赤道正上方的电离层中,沿圆形轨道绕地飞行。系绳卫星由两子卫 星组成,它们之间的导体绳沿地球半径方向,如图所示。在电池和感应电动势的共同作用下, 导体绳中形成指向地心的电流,等效总电阻为 r。导体绳所受的安培力克服大小为 f 的环境 L L H 阻力,可使卫星保持在原轨道上。已知卫生离地平均高度为 H,导体绳长为 ,地球半径为 R,质量为 M,轨道处磁感应强度大小为 B,方向垂直于赤道平面。忽略地球自 转的影响。据此可得,电池电动势为( ) GM fr GM fr A. B. BL BL R H BL R H BL GM BL fr GM BL fr C. BL D. BL R H R H 【答案】A 【解析】 【分析】 【详解】根据 Mm (R H)2 v2 (R H) G m 可得卫星做圆周运动的线速度 GM v R H 第 7 页 共 26 页 根据右手定则可知,导体绳产生的感应电动势相当于上端为正极的电源,其大小为 E’ BLv 因导线绳所受阻力 f 与安培力 F 平衡,则安培力与速度方向相同,可知导线绳中的电流方向 向下,即电池电动势大于导线绳切割磁感线产生的电动势 ,可得 E E’ f B Lr解得 GM fr E BL R H BL 故选 A。 二、多项选择题:本题共 4 小题,每小题 4 分,共 16 分。每小题有多个选项符 合题目要求。全部选对得 4 分,选对但不全的得 2 分,有选错的得 0 分。 9. 输电能耗演示电路如图所示。左侧变压器原、副线圈匝数比为 1∶3,输入电压为 7.5V 的正弦交流电。连接两理想变压器的导线总电阻为 r,负载 R 的阻值为 。开关 S 接 1 10Ω 时,右侧变压器原、副线圈匝数比为 2∶1,R 上的功率为10W ;接 2 时,匝数比为 1∶2, R 上的功率为 P。以下判断正确的是( ) A. r 10Ω B. D. r 5Ω C. P 45W P 22.5W 【答案】BD 【解析】 【分析】 【详解】当开关 S 接 1 时,左侧变压器次级电压 U2=3×7.5V=22.5V 电阻 R 上的电压,即右侧变压器的次级电压 U4 PR 10V 第 8 页 共 26 页 电流 U4 RI4 1A 则右侧变压器初级电压 2U3 10V 20V 1电流 则1I3 1A=0.5A 2U2 U3 r 5Ω I3 当开关 S 接 2 时,设输电电流为 I,则右侧变压器的次级电流为 0.5I;右侧变压两边电压关 系可知 U2 Ir 0.5IR n3 n4 解得 I=3A 则 R 上的功率 P (0.5I)2 R 22.5W 故选 BD。 t 2s t 5s 10. 一列简谐横波沿 x 轴传播,如图所示,实线为 时的波形图,虚线为 时的波 12形图。以下关于平衡位置在 O 处质点的振动图像,可能正确的是( ) 第 9 页 共 26 页 A. B. C. D. 【答案】AC 【解析】 【分析】 【详解】机械波的传播方向不确定,所以需要考虑机械波传播方向的不确定性。 xt 2s AB.若机械波沿 轴正方向传播,在 时点振动方向竖直向上,则传播时间 O1t t t 3s 满足 213t T nT (n=0,1,2,3…) 4解得 当12 T s(n=0,1,2,3…) T 4s 4n 3 时,解得周期 n 0 A 正确,B 错误; xt 5s CD.若机械波沿 轴负方向传播,在 时点处于波谷,则 O21t T nT (n=0,1,2,3…) 4解得 当12 T s(n=0,1,2,3…) 4n 1 时,解得周期 n 0 T 12s 第 10 页 共 26 页 C 正确,D 错误。 故选 AC。 11. 如图所示,载有物资的热气球静止于距水平地面 H 的高处,现将质量为 m 的物资以相 v对地面的速度 0 水平投出,落地时物资与热气球的距离为 d。已知投出物资后热气球的总质 量为 M,所受浮力不变,重力加速度为 g,不计阻力,以下判断正确的是( ) A. 投出物资后热气球做匀加速直线运动 mg B. 投出物资后热气球所受合力大小为 m2Hv02 C. D. d 1 H 2 Mg22Hv02 md 1 H 2 gM【答案】BC 【解析】 【分析】 【详解】AB.热气球开始携带物资时处于静止状态,所受合外力为 0,初动量为 0,水平投 mg 出重力为 的物资瞬间,满足动量守恒定律 Mv mv0 v则热气球和物资的动量等大反向,热气球获得水平向左的速度 ,热气球所受合外力恒为 mg ,竖直向上,所以热气球做匀加速曲线运动,A 错误,B 正确; CD.热气球和物资的运动示意图如图所示 第 11 页 共 26 页 mg 热气球和物资所受合力大小均为 ,所以热气球在竖直方向上加速度大小为 ma gM1H gt2 t过程所用的时间 内,根据 物资落地 H解得落地时间为 22H t g的热气球在竖直方向上运动 位移为 11 m 2H mHM at2 g H22 M gM热气球和物资在水平方向均做匀速直线运动,水平位移为 2H xm v0t v0 gm2H xM vt v0 Mg根据勾股定理可知热气球和物资的实际位移为 m2Hv02 d (xm xM )2 (H HM )2 (1 ) H 2 MgC 正确,D 错误。 故选 BC 。12. 如图所示,电阻不计的光滑 U 形金属导轨固定在绝缘斜面上。区域Ⅰ、Ⅱ中磁场方向均 垂直斜面向上,Ⅰ区中磁感应强度随时间均匀增加,Ⅱ区中为匀强磁场。阻值恒定的金属棒 从无磁场区域中 a 处由静止释放,进入Ⅱ区后,经 b 下行至 c 处反向上行。运动过程中金属 第 12 页 共 26 页 棒始终垂直导轨且接触良好。在第一次下行和上行的过程中,以下叙述正确的是( ) A. 金属棒下行过 b 时的速度大于上行过 b 时的速度 B. 金属棒下行过 b 时的加速度大于上行过 b 时的加速度 C. 金属棒不能回到无磁场区 D. 金属棒能回到无磁场区,但不能回到 a 处 【答案】ABD 【解析】 【分析】 B kt 【详解】AB.在 I 区域中,磁感应强度为 ,感应电动势为 1B E1 1 S kS t 感应电动势恒定,所以导体棒上的感应电流恒为 E1 kS I1 RR导体棒进入Ⅱ区域后,导体切割磁感线,感应电动势 为E2 BLv 导体棒上的电流为 E2 BLv I2 RRcⅠ区域产生的电流对导体棒的安培力始终沿斜面向上,大小恒定不变,因为导体棒到达 点 后又能上行,说明加速度始终沿斜面向上,下行和上行经过 点的受力分析如图 b第 13 页 共 26 页 下行过程中,根据牛顿第二定律可知 B I1L B2I2L mg sin ma1 1上行过程中,根据牛顿第二定律可知 B I1L B2I2L mg sin ma2 1比较加速度大小可知 a1 a2 由于bc 段距离不变,下行过程中加速度大,上行过程中加速度小,所以金属板下行过经过 b点时的速度大于上行经过 点时的速度,AB 正确; bCD.Ⅰ区域产生的安培力总是大于沿斜面向下的作用力,所以金属棒一定能回到无磁场区 域,由于整个过程中电流通过金属棒产生焦耳热,金属棒的机械能减少,所以金属棒不能回 a到处,C 错误,D 正确。 故选 ABD。 三、非选择题:本题共 6 小题,共 60 分。 13. 某乒乓球爱好者,利用手机研究乒乓球与球台碰撞过程中能量损失的情况。实验步骤如 下: ①固定好手机,打开录音功能; ②从一定高度由静止释放乒乓球; ③手机记录下乒乓球与台面碰撞的声音,其随时间(单位:s)的变化图像如图所示。 根据声音图像记录的碰撞次序及相应碰撞时刻,如下表所示。 第 14 页 共 26 页 碰撞次序 1234567碰撞时刻(s) 1.12 1.58 2.00 2.40 2.78 3.14 3.47 根据实验数据,回答下列向题: (1)利用碰撞时间间隔,计算出第 3 次碰撞后乒乓球的弹起高度为___________m(保留 2 位有效数字,当地重力加速度 g 9.80m/s2 )。 (2)设碰撞后弹起瞬间与该次碰撞前瞬间速度大小的比值为 k,则每次碰撞损失的动能为 k 碰撞前动能的___________倍(用 k 表示),第 3 次碰撞过程中 ___________(保留 2 位 有效数字)。 (3)由于存在空气阻力,第(1)问中计算的弹起高度___________(填“高于”或“低 于”)实际弹起高度。 1 k2 【答案】 ①. 0.20 ②. ③. 0.95 ④. 高于 【解析】 【分析】 t 2.40s 2.00s 0.40s 【详解】(1)[1]第 3 次碰撞到第 4 次碰撞用时 ,根据竖直上抛和 0自由落体运动的对称性可知第 3 次碰撞后乒乓球弹起的高度为 1t0 1h0 g( )2 9.82 0.22 m 0.20m 222v v 2 ,碰撞前瞬间速度为 1 ,根据题意可知 (2)[2]碰撞后弹起瞬间速度 为v2 k v1 则每次碰撞损失的动能与碰撞前动能的比值为 1211mv12 mv22 mv22 mv12 1 1 k2 2mv12 21122[3]第 3 次碰撞前瞬间速度为第 2 次碰后从最高点落地瞬间的速度 2.00 1.58 v gt ( )g 0.21g 2第 3 次碰撞后瞬间速度为 2.40 2.00 2第 15 页 共 26 页 v gt ( )g 0.20g 则第 3 次碰撞过程中 v 0.20 k 0.95 v0.21 (3)[4]由于存在空气阻力,乒乓球在上升过程中受到向下的阻力和重力,加速度变大,上 升的高度变小,所以第(1)问中计算的弹起高度高于实际弹起的高度。 14. 热敏电阻是传感器中经常使用的元件,某学习小组要探究一热敏电阻的阻值随温度变化 的规律。可供选择的器材有: R待测热敏电阻 T (实验温度范围内,阻值约几百欧到几千欧); 1.5V 0.5Ω ); 电源 E(电动势 ,内阻 r 约 为电阻箱 R(阻值范围 ); 0 ~ 9999.99Ω 滑动变阻器 R 1(最大阻值 20Ω ); R滑动变阻器 (最大阻值 ); 2000Ω 2100μA 微安表(量程 ,内阻等于 2500Ω ); 开关两个,温控装置一套,导线若干。 同学们设计了如图甲所示的测量电路,主要实验步骤如下: ①按图示连接电路; SS2 ,调节滑动变阻器滑片 P 的位置,使微安表指针满偏; ②闭合 、1S③保持滑动变阻器滑片 P 的位置不变,断开 2 ,调节电阻箱,使微安表指针半偏; ④记录此时的温度和电阻箱的阻值。 回答下列问题: (1)为了更准确地测量热敏电阻的阻值,滑动变阻器应选用___________(填“R ”或 1第 16 页 共 26 页 R“ ”)。 2(2)请用笔画线代替导线,在答题卡上将实物图(不含温控装置)连接成完整电路 __________。 (3)某温度下微安表半偏时,电阻箱的读数为 ,该温度下热敏电阻的测量值为 6000.00 ___________ Ω(结果保留到个位),该测量值___________(填“大于”或“小于”)真实 值。 (4)多次实验后,学习小组绘制了如图乙所示的图像。由图像可知。该热敏电阻的阻值随 温度的升高逐渐___________(填“增大”或“减小”)。 R【答案】 ①. ②. ③. 3500 ④. 大于 1⑤. 减小 【解析】 【分析】 【详解】(1)[1]用半偏法测量热敏电阻的阻值,尽可能让该电路的电压在 S2 闭合前、后保 持不变,由于该支路与滑动变阻器前半部分并联,滑动变阻器的阻值越小,S2 闭合前、后 该部分电阻变化越小,从而电压的值变化越小,故滑动变阻器应选 R1 (2)[2]电路连接图如图所示 第 17 页 共 26 页 (3)[3]微安表半偏时,该支路的总电阻为原来的 2 倍,即 RT RA 6000Ω 可得 RT 3500Ω [4]当断开 S2,微安表半偏时,由于该支路的电阻增加,电压略有升高,根据欧姆定律,总 电阻比原来 2 倍略大,也就是电阻箱的阻值略大于热敏电阻与微安表的总电阻,而认为电阻 箱的阻值等于热敏电阻与微安表的总电阻,因此热敏电阻的测量值比真实值偏大。 11ln R 减小, Tln R (4)[5]由于是 图像,当温度 T 升高时, 减小,从图中可以看出 TTTR从而 减小,因此热敏电阻随温度的升高逐渐减小。 T15. 超强超短光脉冲产生方法曾获诺贝尔物理学奖,其中用到的一种脉冲激光展宽器截面如 图所示。在空气中对称放置四个相同的直角三棱镜,顶角为 。一细束脉冲激光垂直第一个 棱镜左侧面入射,经过前两个棱镜后分为平行的光束,再经过后两个棱镜重新合成为一束, 此时不同频率的光前后分开,完成脉冲展宽。已知相邻两棱镜斜面间的距离 ,d 100.0mm 31 脉冲激光中包含两种频率的光,它们在棱镜中的折射率分别为 和。取 n1 2 n2 453545 1.890 。sin37 cos37 ,,7(1)为使两种频率的光都能从左侧第一个棱镜斜面射出,求 的取值范围; (2)若 ,求两种频率的光通过整个展宽器的过程中,在空气中的路程差 L (保留 37 3 位有效数字)。 第 18 页 共 26 页 【答案】(1) 【解析】 (或 45 );(2) ΔL 14.4mm 0 45 【分析】 【详解】(1)设 C 是全反射的临界角,光线在第一个三梭镜右侧斜面上恰好发生全反射时, 根据折射定律得 1①sinC n代入较大的折射率得 C 45 ②所以顶角 的范围为 0 45 (或 45 )③ (2)脉冲激光从第一个三棱镜右侧斜面射出时发生折射,设折射角分别为 1 和 2 ,由折 射定律得 sin1 sin n1 ④sin2 sin n2 ⑤LL设两束光在前两个三棱镜斜面之间的路程分别为 1 和 2 ,则 dL ⑥1cos1 dL2 ⑦cos2 第 19 页 共 26 页 ΔL 2 L I 2 ⑧1联立④⑤⑥⑦⑧式,代入数据得 ⑨ΔL 14.4mm 16. 海鸥捕到外壳坚硬的鸟蛤(贝类动物)后,有时会飞到空中将它丢下,利用地面的冲击 m 0.1kg v 15m/s 打碎硬壳。一只海鸥叼着质量 速度飞行时,松开嘴巴让鸟蛤落到水平地面上。取重力加速度 g 10m/s2 ,忽略空气阻力。 (1)若鸟蛤与地面的碰撞时间 ,弹起速度可忽略,求碰撞过程中鸟蛤受到的平 的鸟蛤,在 H 20m 的高度、以 的水平 0t 0.005s 均作用力的大小 F;(碰撞过程中不计重力) (2)在海鸥飞行方向正下方的地面上,有一与地 面平齐、长度 的岩石,以岩石 ,速度大小在 L 6m 左端为坐标原点,建立如图所示坐标系。若海鸥水平飞行的高度仍为 20m 之间,为保证鸟蛤一定能落到岩石上,求释放鸟蛤位置的 x 坐标范围。 15m/s ~ 17m/s [34m,36m] (34m,36m) 或【答案】(1) F 500N ;(2) 【解析】 【分析】 【详解】(1)设平抛运动的时间为 t,鸟蛤落地前瞬间的速度大小为 v。竖直方向分速度大 v小为 y ,根据运动的合成与分解得 1H gt2 v v02 vy2 v gt ,,y2在碰撞过程中,以鸟蛤为研究对象,取速度 v 的方向为正方向,由动量定理得 FΔt 0 mv 联立,代入数据得 F 500N 第 20 页 共 26 页 v 15m/s (2)若释放鸟蛤的初速度为 ,设击中岩石左端时,释放点的 x 坐标为 x,击中 1x右端时,释放点的 x 坐标为 2 ,得 x v tx x L ,1121联立,代入数据得 x 30m x 36 ,m12,设击中岩石左端时,释放点的 x 坐标为 ,击中右 x1 v 17m/s 若释放鸟蛤时的初速度为 2端时,释放点的 x 坐标为 ,得 x2 ,x1 v2t x2 x1 L 联立,代入数据得 ,x1 34m x2 40m 综上得 x 坐标区间 [34m,36m] (34m,36m) 或17. 某离子实验装置的基本原理如图甲所示。Ⅰ区宽度为 d,左边界与 x 轴垂直交于坐标面 xOy B平面向里的匀强磁场,磁感应强度大小为 0 ;Ⅱ区宽度为 L, 点 O,其内充满垂直于 OO左边界与 x 轴垂直交于 1 点,右边界与 x 轴垂直交于 2 点,其内充满沿 y 轴负方向的匀强 O电场。测试板垂直 x 轴置于Ⅱ区右边界,其中心 C 与 2 点重合。从离子源不断飘出电荷量 为 q、质量为 m 的正离子,如速后沿 x 轴正方向过 Q 点,依次经Ⅰ区、Ⅱ区,恰好到达测 试板中心 C。已知离子刚进入Ⅱ区时速度方向与 x 轴正方向的夹角为 。忽略离子间的相互 作用,不计重力。 (1)求离子在Ⅰ区中运动时速度的大小 v; (2)求Ⅱ区内电场强度的大小 E; (3)保持上述条件不变,将Ⅱ区分为左右两部分,分别填充磁感应强度大小均为 B(数值 未知)方向相反且平行 y 轴的匀强磁场,如图乙所示。为使离子的运动轨迹与测试板相切于 OC 点,需沿 x 轴移动测试板,求移动后 C 到 1 的距离 s。 第 21 页 共 26 页 qB0d 2qB02d2 ddv E L tan 【 答 案 】( 1 ) 6( 31) ;( 2 ) ;( 3 ) 2msin mL tan2 sin tan s L7 【解析】 【分析】 【详解】(1)设离子在Ⅰ区内做匀速圆周运动的半径为 r,由牛顿第二定律得 v2 ①qvB0 m r根据几何关系得 dsin ②r联立①②式得 qB0d v msin (2)离子在Ⅱ区内只受电场力,x 方向做匀速直线运动,y 方向做匀变速直线运动,设从进 y入电场到击中测试板中心 C 的时间为 t,y 方向的位移为地 0 ,加速度大小为 a,由牛顿第 二定律得 qE ma 由运动的合成与分解得 第 22 页 共 26 页 1y vtsin at2 y r(1 cos) ,,L vt cos 002联立得 2qB02d2 ddE L tan 2mL tan2 sin tan (3)Ⅱ区内填充磁场后,离子在垂直 y 轴的方向做匀速圆周运动,如图所示。设左侧部分 的圆心角为 ,圆周运动半径为 ,运动轨迹长度为 ,由几何关系得 lr23 2 2 ,2xr l 2 离子在Ⅱ区内的运动时间不变,故有 lLvcos vcos OC 到 1 的距离 S 2r sin r 联立得 6( 31) s L7 18. 如图所示,三个质量均为 m 的小物块 A、B、C,放置在水平地面上,A 紧靠竖直墙壁, 一劲度系数为 k 的轻弹簧将 A、B 连接,C 紧靠 B,开始时弹簧处于原长,A、B、C 均静止。 现给 C 施加一水平向左、大小为 F 的恒力,使 B、C 一起向左运动,当速度为零时,立即 撤去恒力,一段时间后 A 离开墙壁,最终三物块都停止运动。已知 A、B、C 与地面间的滑 动摩擦力大小均为 f,最大静摩擦力等于滑动摩擦力,弹簧始终在弹性限度内。(弹簧的弹性 1E kx2 势能可表示为: ,k 为弹簧的劲度系数,x 为弹簧的形变量) p2xE;k(1)求 B、C 向左移动的最大距离 0 和 B、C 分离时 B 的动能 第 23 页 共 26 页 F(2)为保证 A 能离开墙壁,求恒力的最小值 ;min x(3)若三物块都停止时 B、C 间的距离为 BC ,从 B、C 分离到 B 停止运动的整个过程,B fx 克服弹簧弹力做的功为 W,通过推导比较 W 与 BC 的大小; F 5 f (4)若 ,请在所给坐标系中,画出 C 向右运动过程中加速度 a 随位移 x 变化的图 像,并在坐标轴上标出开始运动和停止运动时的 a、x 值(用 f、k、m 表示),不要求推导过 程。以撤去 F 时 C 的位置为坐标原点,水平向右为正方向。 F2 6 fF 8 f 2 2F 4 f 10 x 【答案】(1) 、;(2) ;(3) ) f Ek Fmin (3 0kk2W fx BC ;(4) 【解析】 【分析】 【详解】(1)从开始到 B、C 向左移动到最大距离的过程中,以 B、C 和弹簧为研究对象, 由功能关系得 1Fx0 2 fx0 kx02 2弹簧恢复原长时 B、C 分离,从弹簧最短到 B、C 分离,以 B、C 和弹簧为研究对象,由能 量守恒得 1kx02 2 fx0 2Ek 2第 24 页 共 26 页 联立方程解得 2F 4 f x0 kF2 6 fF 8 f 2 Ek kx(2)当 A 刚要离开墙时,设弹簧得伸长量为 ,以A 为研究对象,由平衡条件得 kx f F若 A 刚要离开墙壁时 B 得速度恰好等于零,这种情况下恒力为最小值 min ,从弹簧恢复原 长到 A 刚要离开墙得过程中,以 B 和弹簧为研究对象,由能量守恒得 1Ek kx2 fx 2结合第(1)问结果可知 10 Fmin (3 ) f 210 2根据题意舍去 ,所以恒力得最小值为 Fmin (3 ) f 10 Fmin (3 ) f 2xx(3)从 B、C 分离到 B 停止运动,设 B 的路程为 B ,C 的位移为 C ,以 B 为研究对象, 由动能定理得 W fxB 0 Ek 以 C 为研究对象,由动能定理得 fxC 0 Ek 由 B、C 得运动关系得 xB xC xBC 联立可知 W fxBC (4)小物块 B、C 向左运动过程中,由动能定理得 第 25 页 共 26 页 15 fx1 2 fx1 kx12 0 2解得撤去恒力瞬间弹簧弹力为 则坐标原点的加速度为 kx1 6 f kx1 2 f 6 f 2 f 2 f a1 2m 2m m之后 C 开始向右运动过程(B、C 系统未脱离弹簧)加速度为 kx 2 f a 2m xxa可知加速度随位移 为线性关系,随着弹簧逐渐恢复原长, 减小, 减小,弹簧恢复原长 时,B 和 C 分离,之后 C 只受地面的滑动摩擦力,加速度为 fa2 m负号表示 C 的加速度方向水平向左;从撤去恒力之后到弹簧恢复原长,以 B、C 为研究对象, 由动能定理得 121kx12 2 fx1 2mv2 2v脱离弹簧瞬间后 C 速度为 ,之后C 受到滑动摩擦力减速至 0,由能量守恒得 1fx2 mv2 2解得脱离弹簧后,C 运动的距离为 1×2 x1 2则 C 最后停止的位移为 33 6f 9 f x1 x2 x1 22 k k所以 C 向右运动的图象为 第 26 页 共 26 页
绝密★启用前 2021 年普通高等学校招生全国统一考试(山东卷) 物 理 注意事项: 1.答卷前,考生务必将自己的姓名、考生号等填写在答题卡和试卷指定位置。 2.回答选择题时,选出每小题答案后,用铅笔把答题卡上对应题目的答案标号涂 黑。如需改动,用橡皮擦干净后,再选涂其他答案标号。回答非选择题时,将 答案写在答题卡上,写在本试卷上无效。 3.考试结束后,将本试卷和答题卡一并交回。 一、单项选择题:本题共 8 小题,每小题 3 分,共 24 分。每小题只有一个选项 符合题目要求。 210 Pb 1. 在测定年代较近的湖泊沉积物形成年份时,常利用沉积物中半衰期较短的 82 ,其衰变 210 Pb 210 Bi X 方程为 82 。以下说法正确的是( ) 83 A. 衰变方程中的 X 是电子 210 Pb B. 升高温度可以加快 82 的衰变 210 Pb 210 Bi 的质量差等于衰变的质量亏损 C. 与 83 82 210 Pb D. 方程中的 X 来自于 82 内质子向中子的转化 【答案】A 【解析】 【分析】 【详解】A.根据质量数守恒和电荷数守恒可知,X 是电子,A 正确; B.半衰期非常稳定,不受温度,压强,以及该物质是单质还是化合物的影响,B 错误; 210 Pb 210 Bi C. 与和电子 X 的质量差等于衰变的质量亏损,C 错误; 82 83 210 Pb D.方程中的 X 来自于 故选 A。 内中子向质子的转化,D 错误。 82 2. 如图所示,密封的矿泉水瓶中,距瓶口越近水的温度越高。一开口向下、导热良好的小 第 1 页 共 26 页 瓶置于矿泉水瓶中,小瓶中封闭一段空气。挤压矿泉水瓶,小瓶下沉到底部;松开后,小瓶 缓慢上浮,上浮过程中,小瓶内气体( ) A. 内能减少 B. 对外界做正功 C. 增加的内能大于吸收的热量 D. 增加的内能等于吸收的热量 【答案】B 【解析】 【分析】 【详解】A.由于越接近矿泉水瓶口,水的温度越高,因此小瓶上浮的过程中,小瓶内温度 升高,内能增加,A 错误; B.在小瓶上升的过程中,小瓶内气体的温度逐渐升高,压强逐渐减小,根据理想气体状态 方程 pV C T气体体积膨胀,对外界做正功,B 正确; CD.由 AB 分析,小瓶上升时,小瓶内气体内能增加,气体对外做功,根据热力学第一定 律U W Q 由于气体对外做功,因此吸收的热量大于增加的内能,CD 错误。 故选 B。 3. 如图所示,粗糙程度处处相同的水平桌面上有一长为 L 的轻质细杆,一端可绕竖直光滑 第 2 页 共 26 页 v轴 O 转动,另一端与质量为 m 的小木块相连。木块以水平初速度 0 出发,恰好能完成一个 完整的圆周运动。在运动过程中,木块所受摩擦力的大小为( ) mv02 mv02 mv02 mv02 A. B. C. D. 2 L 4 L 8 L 16 L 【答案】B 【解析】 【分析】 【详解】在运动过程中,只有摩擦力做功,而摩擦力做功与路径有关,根据动能定理 1 f 2 L 0 mv02 2可得摩擦力的大小 mv02 f 4 L 故选 B。 4. 血压仪由加压气囊、臂带,压强计等构成,如图所示。加压气囊可将外界空气充入臂带, 压强计示数为臂带内气体的压强高于大气压强的数值,充气前臂带内气体压强为大气压强, 体积为 V;每次挤压气囊都能将 3 的外界空气充入臂带中,经 5 次充气后,臂带内气 60cm 150mmHg 750mmHg ,气体温度不变。 体体积变为5V ,压强计示数为 。已知大气压强等于 忽略细管和压强计内的气体体积。则 V 等于( ) 第 3 页 共 26 页 30cm3 40cm3 50cm3 60cm3 A. B. C. D. 【答案】D 【解析】 【分析】 【详解】根据玻意耳定律可知 p0V 5p0V0 p1 5V 已知 V 60cm3 p 750mmHg p 750mmHg+150mmHg 900mmHg ,,010代入数据整理得 V 60cm3 故选 D。 5. 从“玉兔”登月到“祝融”探火,我国星际探测事业实现了由地月系到行星际的跨越。 已知火星质量约为月球的 9 倍,半径约为月球的 2 倍,“祝融”火星车的质量约为“玉兔” 月球车的 2 倍。在着陆前,“祝融”和“玉兔”都会经历一个由着陆平台支撑的悬停过程。 悬停时,“祝融”与“玉兔”所受陆平台的作用力大小之比为( ) A. 9∶1 B. 9∶2 C. 36∶1 D. 72∶1 【答案】B 第 4 页 共 26 页 【解析】 【分析】 【详解】悬停时所受平台的作用力等于万有引力,根据 mM R2 F G 可得 F祝融 F玉兔 M火m祝融 M月m玉兔 922 92=G :G =2= 22R火 R月 故选 B。 q 6. 如图甲所示,边长为 a 的正方形,四个顶点上分别固定一个电荷量为 的点电荷;在 2Q 区间,x 轴上电势 的变化曲线如图乙所示。现将一电荷量为 的点电荷 P 0 x a2置于正方形的中心 O 点,此时每个点电荷所受库仑力的合力均为零。若将 P 沿 x 轴向右略 微移动后,由静止释放,以下判断正确的是( ) 2 1 2A. B. C. D. ,释放后 P 将向右运动 ,释放后 P 将向左运动 ,释放后 P 将向右运动 Q Q Q Q qq2 1 22 21 q42 21 ,释放后 P 将向左运动 q4【答案】C 【解析】 【分析】 第 5 页 共 26 页 【详解】对 y 轴正向的点电荷,由平衡知识可得 q2 q2 ( 2a)2 Qq 2k k k a2 2(a)2 22 21 解得 因在 Q q42区间内沿 x 轴正向电势升高,则场强方向沿 x 轴负向,则将 P 沿 x 轴正 a0 x 2向向右略微移动后释放,P 受到向右的电场力而向右运动。 故选 C。 7. 用平行单色光垂直照射一层透明薄膜,观察到如图所示明暗相间的干涉条纹。下列关于 该区域薄膜厚度 d 随坐标 x 的变化图像,可能正确的是( ) A. C. B. D. 【答案】D 【解析】 【分析】 【详解】从薄膜的上下表面分别反射的两列光是相干光,其光程差为△x=2d,即光程差为薄 膜厚度的 2 倍,当光程差△x=nλ 时此处表现为亮条纹,故相邻亮条纹之间的薄膜的厚度差为 1λ,在图中相邻亮条纹(或暗条纹)之间的距离变大,则薄膜层的厚度之间变小,因条纹 2宽度逐渐变宽,则厚度不是均匀变小。 第 6 页 共 26 页 故选 D。 8. 迷你系绳卫星在地球赤道正上方的电离层中,沿圆形轨道绕地飞行。系绳卫星由两子卫 星组成,它们之间的导体绳沿地球半径方向,如图所示。在电池和感应电动势的共同作用下, 导体绳中形成指向地心的电流,等效总电阻为 r。导体绳所受的安培力克服大小为 f 的环境 L L H 阻力,可使卫星保持在原轨道上。已知卫生离地平均高度为 H,导体绳长为 ,地球半径为 R,质量为 M,轨道处磁感应强度大小为 B,方向垂直于赤道平面。忽略地球自 转的影响。据此可得,电池电动势为( ) GM fr GM fr A. B. BL BL R H BL R H BL GM BL fr GM BL fr C. BL D. BL R H R H 【答案】A 【解析】 【分析】 【详解】根据 Mm (R H)2 v2 (R H) G m 可得卫星做圆周运动的线速度 GM v R H 第 7 页 共 26 页 根据右手定则可知,导体绳产生的感应电动势相当于上端为正极的电源,其大小为 E’ BLv 因导线绳所受阻力 f 与安培力 F 平衡,则安培力与速度方向相同,可知导线绳中的电流方向 向下,即电池电动势大于导线绳切割磁感线产生的电动势 ,可得 E E’ f B Lr解得 GM fr E BL R H BL 故选 A。 二、多项选择题:本题共 4 小题,每小题 4 分,共 16 分。每小题有多个选项符 合题目要求。全部选对得 4 分,选对但不全的得 2 分,有选错的得 0 分。 9. 输电能耗演示电路如图所示。左侧变压器原、副线圈匝数比为 1∶3,输入电压为 7.5V 的正弦交流电。连接两理想变压器的导线总电阻为 r,负载 R 的阻值为 。开关 S 接 1 10Ω 时,右侧变压器原、副线圈匝数比为 2∶1,R 上的功率为10W ;接 2 时,匝数比为 1∶2, R 上的功率为 P。以下判断正确的是( ) A. r 10Ω B. D. r 5Ω C. P 45W P 22.5W 【答案】BD 【解析】 【分析】 【详解】当开关 S 接 1 时,左侧变压器次级电压 U2=3×7.5V=22.5V 电阻 R 上的电压,即右侧变压器的次级电压 U4 PR 10V 第 8 页 共 26 页 电流 U4 RI4 1A 则右侧变压器初级电压 2U3 10V 20V 1电流 则1I3 1A=0.5A 2U2 U3 r 5Ω I3 当开关 S 接 2 时,设输电电流为 I,则右侧变压器的次级电流为 0.5I;右侧变压两边电压关 系可知 U2 Ir 0.5IR n3 n4 解得 I=3A 则 R 上的功率 P (0.5I)2 R 22.5W 故选 BD。 t 2s t 5s 10. 一列简谐横波沿 x 轴传播,如图所示,实线为 时的波形图,虚线为 时的波 12形图。以下关于平衡位置在 O 处质点的振动图像,可能正确的是( ) 第 9 页 共 26 页 A. B. C. D. 【答案】AC 【解析】 【分析】 【详解】机械波的传播方向不确定,所以需要考虑机械波传播方向的不确定性。 xt 2s AB.若机械波沿 轴正方向传播,在 时点振动方向竖直向上,则传播时间 O1t t t 3s 满足 213t T nT (n=0,1,2,3…) 4解得 当12 T s(n=0,1,2,3…) T 4s 4n 3 时,解得周期 n 0 A 正确,B 错误; xt 5s CD.若机械波沿 轴负方向传播,在 时点处于波谷,则 O21t T nT (n=0,1,2,3…) 4解得 当12 T s(n=0,1,2,3…) 4n 1 时,解得周期 n 0 T 12s 第 10 页 共 26 页 C 正确,D 错误。 故选 AC。 11. 如图所示,载有物资的热气球静止于距水平地面 H 的高处,现将质量为 m 的物资以相 v对地面的速度 0 水平投出,落地时物资与热气球的距离为 d。已知投出物资后热气球的总质 量为 M,所受浮力不变,重力加速度为 g,不计阻力,以下判断正确的是( ) A. 投出物资后热气球做匀加速直线运动 mg B. 投出物资后热气球所受合力大小为 m2Hv02 C. D. d 1 H 2 Mg22Hv02 md 1 H 2 gM【答案】BC 【解析】 【分析】 【详解】AB.热气球开始携带物资时处于静止状态,所受合外力为 0,初动量为 0,水平投 mg 出重力为 的物资瞬间,满足动量守恒定律 Mv mv0 v则热气球和物资的动量等大反向,热气球获得水平向左的速度 ,热气球所受合外力恒为 mg ,竖直向上,所以热气球做匀加速曲线运动,A 错误,B 正确; CD.热气球和物资的运动示意图如图所示 第 11 页 共 26 页 mg 热气球和物资所受合力大小均为 ,所以热气球在竖直方向上加速度大小为 ma gM1H gt2 t过程所用的时间 内,根据 物资落地 H解得落地时间为 22H t g的热气球在竖直方向上运动 位移为 11 m 2H mHM at2 g H22 M gM热气球和物资在水平方向均做匀速直线运动,水平位移为 2H xm v0t v0 gm2H xM vt v0 Mg根据勾股定理可知热气球和物资的实际位移为 m2Hv02 d (xm xM )2 (H HM )2 (1 ) H 2 MgC 正确,D 错误。 故选 BC 。12. 如图所示,电阻不计的光滑 U 形金属导轨固定在绝缘斜面上。区域Ⅰ、Ⅱ中磁场方向均 垂直斜面向上,Ⅰ区中磁感应强度随时间均匀增加,Ⅱ区中为匀强磁场。阻值恒定的金属棒 从无磁场区域中 a 处由静止释放,进入Ⅱ区后,经 b 下行至 c 处反向上行。运动过程中金属 第 12 页 共 26 页 棒始终垂直导轨且接触良好。在第一次下行和上行的过程中,以下叙述正确的是( ) A. 金属棒下行过 b 时的速度大于上行过 b 时的速度 B. 金属棒下行过 b 时的加速度大于上行过 b 时的加速度 C. 金属棒不能回到无磁场区 D. 金属棒能回到无磁场区,但不能回到 a 处 【答案】ABD 【解析】 【分析】 B kt 【详解】AB.在 I 区域中,磁感应强度为 ,感应电动势为 1B E1 1 S kS t 感应电动势恒定,所以导体棒上的感应电流恒为 E1 kS I1 RR导体棒进入Ⅱ区域后,导体切割磁感线,感应电动势 为E2 BLv 导体棒上的电流为 E2 BLv I2 RRcⅠ区域产生的电流对导体棒的安培力始终沿斜面向上,大小恒定不变,因为导体棒到达 点 后又能上行,说明加速度始终沿斜面向上,下行和上行经过 点的受力分析如图 b第 13 页 共 26 页 下行过程中,根据牛顿第二定律可知 B I1L B2I2L mg sin ma1 1上行过程中,根据牛顿第二定律可知 B I1L B2I2L mg sin ma2 1比较加速度大小可知 a1 a2 由于bc 段距离不变,下行过程中加速度大,上行过程中加速度小,所以金属板下行过经过 b点时的速度大于上行经过 点时的速度,AB 正确; bCD.Ⅰ区域产生的安培力总是大于沿斜面向下的作用力,所以金属棒一定能回到无磁场区 域,由于整个过程中电流通过金属棒产生焦耳热,金属棒的机械能减少,所以金属棒不能回 a到处,C 错误,D 正确。 故选 ABD。 三、非选择题:本题共 6 小题,共 60 分。 13. 某乒乓球爱好者,利用手机研究乒乓球与球台碰撞过程中能量损失的情况。实验步骤如 下: ①固定好手机,打开录音功能; ②从一定高度由静止释放乒乓球; ③手机记录下乒乓球与台面碰撞的声音,其随时间(单位:s)的变化图像如图所示。 根据声音图像记录的碰撞次序及相应碰撞时刻,如下表所示。 第 14 页 共 26 页 碰撞次序 1234567碰撞时刻(s) 1.12 1.58 2.00 2.40 2.78 3.14 3.47 根据实验数据,回答下列向题: (1)利用碰撞时间间隔,计算出第 3 次碰撞后乒乓球的弹起高度为___________m(保留 2 位有效数字,当地重力加速度 g 9.80m/s2 )。 (2)设碰撞后弹起瞬间与该次碰撞前瞬间速度大小的比值为 k,则每次碰撞损失的动能为 k 碰撞前动能的___________倍(用 k 表示),第 3 次碰撞过程中 ___________(保留 2 位 有效数字)。 (3)由于存在空气阻力,第(1)问中计算的弹起高度___________(填“高于”或“低 于”)实际弹起高度。 1 k2 【答案】 ①. 0.20 ②. ③. 0.95 ④. 高于 【解析】 【分析】 t 2.40s 2.00s 0.40s 【详解】(1)[1]第 3 次碰撞到第 4 次碰撞用时 ,根据竖直上抛和 0自由落体运动的对称性可知第 3 次碰撞后乒乓球弹起的高度为 1t0 1h0 g( )2 9.82 0.22 m 0.20m 222v v 2 ,碰撞前瞬间速度为 1 ,根据题意可知 (2)[2]碰撞后弹起瞬间速度 为v2 k v1 则每次碰撞损失的动能与碰撞前动能的比值为 1211mv12 mv22 mv22 mv12 1 1 k2 2mv12 21122[3]第 3 次碰撞前瞬间速度为第 2 次碰后从最高点落地瞬间的速度 2.00 1.58 v gt ( )g 0.21g 2第 3 次碰撞后瞬间速度为 2.40 2.00 2第 15 页 共 26 页 v gt ( )g 0.20g 则第 3 次碰撞过程中 v 0.20 k 0.95 v0.21 (3)[4]由于存在空气阻力,乒乓球在上升过程中受到向下的阻力和重力,加速度变大,上 升的高度变小,所以第(1)问中计算的弹起高度高于实际弹起的高度。 14. 热敏电阻是传感器中经常使用的元件,某学习小组要探究一热敏电阻的阻值随温度变化 的规律。可供选择的器材有: R待测热敏电阻 T (实验温度范围内,阻值约几百欧到几千欧); 1.5V 0.5Ω ); 电源 E(电动势 ,内阻 r 约 为电阻箱 R(阻值范围 ); 0 ~ 9999.99Ω 滑动变阻器 R 1(最大阻值 20Ω ); R滑动变阻器 (最大阻值 ); 2000Ω 2100μA 微安表(量程 ,内阻等于 2500Ω ); 开关两个,温控装置一套,导线若干。 同学们设计了如图甲所示的测量电路,主要实验步骤如下: ①按图示连接电路; SS2 ,调节滑动变阻器滑片 P 的位置,使微安表指针满偏; ②闭合 、1S③保持滑动变阻器滑片 P 的位置不变,断开 2 ,调节电阻箱,使微安表指针半偏; ④记录此时的温度和电阻箱的阻值。 回答下列问题: (1)为了更准确地测量热敏电阻的阻值,滑动变阻器应选用___________(填“R ”或 1第 16 页 共 26 页 R“ ”)。 2(2)请用笔画线代替导线,在答题卡上将实物图(不含温控装置)连接成完整电路 __________。 (3)某温度下微安表半偏时,电阻箱的读数为 ,该温度下热敏电阻的测量值为 6000.00 ___________ Ω(结果保留到个位),该测量值___________(填“大于”或“小于”)真实 值。 (4)多次实验后,学习小组绘制了如图乙所示的图像。由图像可知。该热敏电阻的阻值随 温度的升高逐渐___________(填“增大”或“减小”)。 R【答案】 ①. ②. ③. 3500 ④. 大于 1⑤. 减小 【解析】 【分析】 【详解】(1)[1]用半偏法测量热敏电阻的阻值,尽可能让该电路的电压在 S2 闭合前、后保 持不变,由于该支路与滑动变阻器前半部分并联,滑动变阻器的阻值越小,S2 闭合前、后 该部分电阻变化越小,从而电压的值变化越小,故滑动变阻器应选 R1 (2)[2]电路连接图如图所示 第 17 页 共 26 页 (3)[3]微安表半偏时,该支路的总电阻为原来的 2 倍,即 RT RA 6000Ω 可得 RT 3500Ω [4]当断开 S2,微安表半偏时,由于该支路的电阻增加,电压略有升高,根据欧姆定律,总 电阻比原来 2 倍略大,也就是电阻箱的阻值略大于热敏电阻与微安表的总电阻,而认为电阻 箱的阻值等于热敏电阻与微安表的总电阻,因此热敏电阻的测量值比真实值偏大。 11ln R 减小, Tln R (4)[5]由于是 图像,当温度 T 升高时, 减小,从图中可以看出 TTTR从而 减小,因此热敏电阻随温度的升高逐渐减小。 T15. 超强超短光脉冲产生方法曾获诺贝尔物理学奖,其中用到的一种脉冲激光展宽器截面如 图所示。在空气中对称放置四个相同的直角三棱镜,顶角为 。一细束脉冲激光垂直第一个 棱镜左侧面入射,经过前两个棱镜后分为平行的光束,再经过后两个棱镜重新合成为一束, 此时不同频率的光前后分开,完成脉冲展宽。已知相邻两棱镜斜面间的距离 ,d 100.0mm 31 脉冲激光中包含两种频率的光,它们在棱镜中的折射率分别为 和。取 n1 2 n2 453545 1.890 。sin37 cos37 ,,7(1)为使两种频率的光都能从左侧第一个棱镜斜面射出,求 的取值范围; (2)若 ,求两种频率的光通过整个展宽器的过程中,在空气中的路程差 L (保留 37 3 位有效数字)。 第 18 页 共 26 页 【答案】(1) 【解析】 (或 45 );(2) ΔL 14.4mm 0 45 【分析】 【详解】(1)设 C 是全反射的临界角,光线在第一个三梭镜右侧斜面上恰好发生全反射时, 根据折射定律得 1①sinC n代入较大的折射率得 C 45 ②所以顶角 的范围为 0 45 (或 45 )③ (2)脉冲激光从第一个三棱镜右侧斜面射出时发生折射,设折射角分别为 1 和 2 ,由折 射定律得 sin1 sin n1 ④sin2 sin n2 ⑤LL设两束光在前两个三棱镜斜面之间的路程分别为 1 和 2 ,则 dL ⑥1cos1 dL2 ⑦cos2 第 19 页 共 26 页 ΔL 2 L I 2 ⑧1联立④⑤⑥⑦⑧式,代入数据得 ⑨ΔL 14.4mm 16. 海鸥捕到外壳坚硬的鸟蛤(贝类动物)后,有时会飞到空中将它丢下,利用地面的冲击 m 0.1kg v 15m/s 打碎硬壳。一只海鸥叼着质量 速度飞行时,松开嘴巴让鸟蛤落到水平地面上。取重力加速度 g 10m/s2 ,忽略空气阻力。 (1)若鸟蛤与地面的碰撞时间 ,弹起速度可忽略,求碰撞过程中鸟蛤受到的平 的鸟蛤,在 H 20m 的高度、以 的水平 0t 0.005s 均作用力的大小 F;(碰撞过程中不计重力) (2)在海鸥飞行方向正下方的地面上,有一与地 面平齐、长度 的岩石,以岩石 ,速度大小在 L 6m 左端为坐标原点,建立如图所示坐标系。若海鸥水平飞行的高度仍为 20m 之间,为保证鸟蛤一定能落到岩石上,求释放鸟蛤位置的 x 坐标范围。 15m/s ~ 17m/s [34m,36m] (34m,36m) 或【答案】(1) F 500N ;(2) 【解析】 【分析】 【详解】(1)设平抛运动的时间为 t,鸟蛤落地前瞬间的速度大小为 v。竖直方向分速度大 v小为 y ,根据运动的合成与分解得 1H gt2 v v02 vy2 v gt ,,y2在碰撞过程中,以鸟蛤为研究对象,取速度 v 的方向为正方向,由动量定理得 FΔt 0 mv 联立,代入数据得 F 500N 第 20 页 共 26 页 v 15m/s (2)若释放鸟蛤的初速度为 ,设击中岩石左端时,释放点的 x 坐标为 x,击中 1x右端时,释放点的 x 坐标为 2 ,得 x v tx x L ,1121联立,代入数据得 x 30m x 36 ,m12,设击中岩石左端时,释放点的 x 坐标为 ,击中右 x1 v 17m/s 若释放鸟蛤时的初速度为 2端时,释放点的 x 坐标为 ,得 x2 ,x1 v2t x2 x1 L 联立,代入数据得 ,x1 34m x2 40m 综上得 x 坐标区间 [34m,36m] (34m,36m) 或17. 某离子实验装置的基本原理如图甲所示。Ⅰ区宽度为 d,左边界与 x 轴垂直交于坐标面 xOy B平面向里的匀强磁场,磁感应强度大小为 0 ;Ⅱ区宽度为 L, 点 O,其内充满垂直于 OO左边界与 x 轴垂直交于 1 点,右边界与 x 轴垂直交于 2 点,其内充满沿 y 轴负方向的匀强 O电场。测试板垂直 x 轴置于Ⅱ区右边界,其中心 C 与 2 点重合。从离子源不断飘出电荷量 为 q、质量为 m 的正离子,如速后沿 x 轴正方向过 Q 点,依次经Ⅰ区、Ⅱ区,恰好到达测 试板中心 C。已知离子刚进入Ⅱ区时速度方向与 x 轴正方向的夹角为 。忽略离子间的相互 作用,不计重力。 (1)求离子在Ⅰ区中运动时速度的大小 v; (2)求Ⅱ区内电场强度的大小 E; (3)保持上述条件不变,将Ⅱ区分为左右两部分,分别填充磁感应强度大小均为 B(数值 未知)方向相反且平行 y 轴的匀强磁场,如图乙所示。为使离子的运动轨迹与测试板相切于 OC 点,需沿 x 轴移动测试板,求移动后 C 到 1 的距离 s。 第 21 页 共 26 页 qB0d 2qB02d2 ddv E L tan 【 答 案 】( 1 ) 6( 31) ;( 2 ) ;( 3 ) 2msin mL tan2 sin tan s L7 【解析】 【分析】 【详解】(1)设离子在Ⅰ区内做匀速圆周运动的半径为 r,由牛顿第二定律得 v2 ①qvB0 m r根据几何关系得 dsin ②r联立①②式得 qB0d v msin (2)离子在Ⅱ区内只受电场力,x 方向做匀速直线运动,y 方向做匀变速直线运动,设从进 y入电场到击中测试板中心 C 的时间为 t,y 方向的位移为地 0 ,加速度大小为 a,由牛顿第 二定律得 qE ma 由运动的合成与分解得 第 22 页 共 26 页 1y vtsin at2 y r(1 cos) ,,L vt cos 002联立得 2qB02d2 ddE L tan 2mL tan2 sin tan (3)Ⅱ区内填充磁场后,离子在垂直 y 轴的方向做匀速圆周运动,如图所示。设左侧部分 的圆心角为 ,圆周运动半径为 ,运动轨迹长度为 ,由几何关系得 lr23 2 2 ,2xr l 2 离子在Ⅱ区内的运动时间不变,故有 lLvcos vcos OC 到 1 的距离 S 2r sin r 联立得 6( 31) s L7 18. 如图所示,三个质量均为 m 的小物块 A、B、C,放置在水平地面上,A 紧靠竖直墙壁, 一劲度系数为 k 的轻弹簧将 A、B 连接,C 紧靠 B,开始时弹簧处于原长,A、B、C 均静止。 现给 C 施加一水平向左、大小为 F 的恒力,使 B、C 一起向左运动,当速度为零时,立即 撤去恒力,一段时间后 A 离开墙壁,最终三物块都停止运动。已知 A、B、C 与地面间的滑 动摩擦力大小均为 f,最大静摩擦力等于滑动摩擦力,弹簧始终在弹性限度内。(弹簧的弹性 1E kx2 势能可表示为: ,k 为弹簧的劲度系数,x 为弹簧的形变量) p2xE;k(1)求 B、C 向左移动的最大距离 0 和 B、C 分离时 B 的动能 第 23 页 共 26 页 F(2)为保证 A 能离开墙壁,求恒力的最小值 ;min x(3)若三物块都停止时 B、C 间的距离为 BC ,从 B、C 分离到 B 停止运动的整个过程,B fx 克服弹簧弹力做的功为 W,通过推导比较 W 与 BC 的大小; F 5 f (4)若 ,请在所给坐标系中,画出 C 向右运动过程中加速度 a 随位移 x 变化的图 像,并在坐标轴上标出开始运动和停止运动时的 a、x 值(用 f、k、m 表示),不要求推导过 程。以撤去 F 时 C 的位置为坐标原点,水平向右为正方向。 F2 6 fF 8 f 2 2F 4 f 10 x 【答案】(1) 、;(2) ;(3) ) f Ek Fmin (3 0kk2W fx BC ;(4) 【解析】 【分析】 【详解】(1)从开始到 B、C 向左移动到最大距离的过程中,以 B、C 和弹簧为研究对象, 由功能关系得 1Fx0 2 fx0 kx02 2弹簧恢复原长时 B、C 分离,从弹簧最短到 B、C 分离,以 B、C 和弹簧为研究对象,由能 量守恒得 1kx02 2 fx0 2Ek 2第 24 页 共 26 页 联立方程解得 2F 4 f x0 kF2 6 fF 8 f 2 Ek kx(2)当 A 刚要离开墙时,设弹簧得伸长量为 ,以A 为研究对象,由平衡条件得 kx f F若 A 刚要离开墙壁时 B 得速度恰好等于零,这种情况下恒力为最小值 min ,从弹簧恢复原 长到 A 刚要离开墙得过程中,以 B 和弹簧为研究对象,由能量守恒得 1Ek kx2 fx 2结合第(1)问结果可知 10 Fmin (3 ) f 210 2根据题意舍去 ,所以恒力得最小值为 Fmin (3 ) f 10 Fmin (3 ) f 2xx(3)从 B、C 分离到 B 停止运动,设 B 的路程为 B ,C 的位移为 C ,以 B 为研究对象, 由动能定理得 W fxB 0 Ek 以 C 为研究对象,由动能定理得 fxC 0 Ek 由 B、C 得运动关系得 xB xC xBC 联立可知 W fxBC (4)小物块 B、C 向左运动过程中,由动能定理得 第 25 页 共 26 页 15 fx1 2 fx1 kx12 0 2解得撤去恒力瞬间弹簧弹力为 则坐标原点的加速度为 kx1 6 f kx1 2 f 6 f 2 f 2 f a1 2m 2m m之后 C 开始向右运动过程(B、C 系统未脱离弹簧)加速度为 kx 2 f a 2m xxa可知加速度随位移 为线性关系,随着弹簧逐渐恢复原长, 减小, 减小,弹簧恢复原长 时,B 和 C 分离,之后 C 只受地面的滑动摩擦力,加速度为 fa2 m负号表示 C 的加速度方向水平向左;从撤去恒力之后到弹簧恢复原长,以 B、C 为研究对象, 由动能定理得 121kx12 2 fx1 2mv2 2v脱离弹簧瞬间后 C 速度为 ,之后C 受到滑动摩擦力减速至 0,由能量守恒得 1fx2 mv2 2解得脱离弹簧后,C 运动的距离为 1×2 x1 2则 C 最后停止的位移为 33 6f 9 f x1 x2 x1 22 k k所以 C 向右运动的图象为 第 26 页 共 26 页
声明:如果本站提供的资源有问题或者不能下载,请点击页面底部的"联系我们";
本站提供的资源大部分来自网络收集整理,如果侵犯了您的版权,请联系我们删除。



